
Haeyoon Han
About Me
I am a PhD student in Control and Dynamical Systems (CDS) at Caltech, currently working with Prof. Soon-Jo Chung in the Autonomous Robotics and Control Laboratory (ARCL). My research interests include vision-based state estimation, robust control, distributed control systems, and their application in spacecraft.
Experience
PhD Student
M.S. in Aerospace Engineering
Thesis:
- Monocular Pose Estimation for Relative Navigation of Uncooperative Spacecraft (Advisor: Prof. Hyochoong Bang)
Projects:
- Design of Small Satellites and Development of Technologies
- Development and Operation of RANDEV CubeSat
- Key Technologies Development for Next-Generation Satellites
Achievements:
- Minister’s Prize for the 5th CubeSat Contest, Ministry of Science and ICT
- Student Award, APISAT-2022
Technologies used:
- MATLAB
- Python
- C
- OpenCV
- Blender
Research Intern
Project:
- Development and Operation of RANDEV CubeSat
: Developed image compression algorithm for Hyperspectral camera of RANDEV CubeSat
Technologies used:
- MATLAB
- C
- JPEG
Interests
Keywords
- Optimal Control and Estimation
- Multi-Agent Systems
- 3D Computer Vision
Skills & Tools
- Spacecraft GNC
- CubeSat
- Satellite Systems
- MATLAB
- C
- Python
- OpenCV
- PyTorch
- Blender
Education
-
M.S. in Aerospace EngineeringKAISTMar. 2021 - Feb. 2023
-
B.S. in Aerospace EngineeringKAISTMar. 2016 - Feb. 2021
- summa cum laude
Language
- Korean (Native)
- English (Professional)
Hobbies
- Photography
- Reading
Previous Works

Monocular pose estimation of an uncooperative spacecraft (2022)
A monocular pose estimation framework from image processing and pose determination to pose tracking was developed for relative navigation.
- Pose determination: Proposed a monocular pose estimation algorithm that uses convexity defect features to estimate the relative pose of known but uncooperative spacecraft
- Pose tracking: Designed a Multiplicative Extended Kalman Filter to estimate the relative states in a specific flight scenario
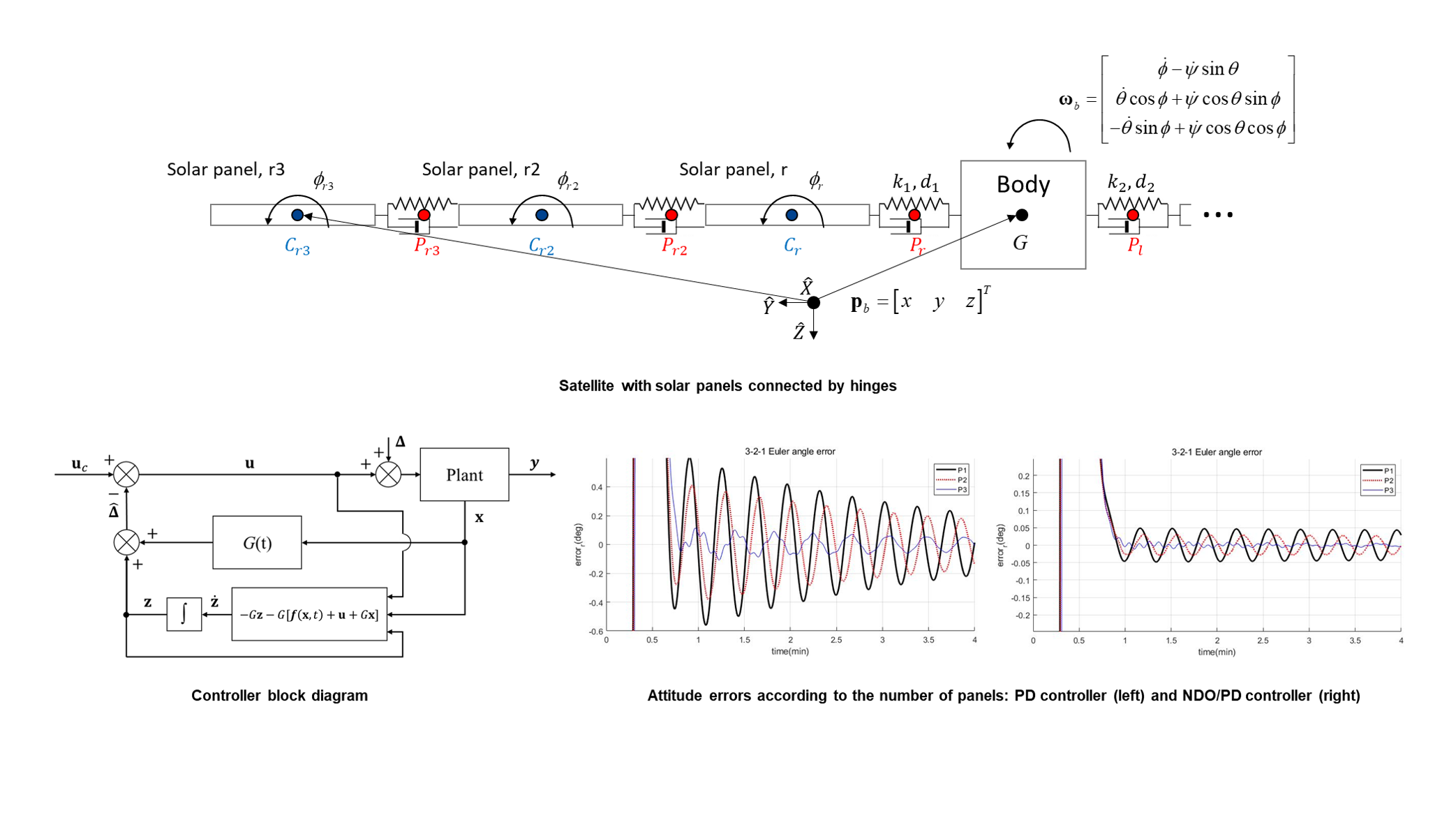
Disturbance observer-based PD control for satellites with flexible solar arrays (2022)
A Nonlinear Disturbance Observer-based PD controller was designed to suppress the vibration caused by flexible hinges connecting panels.
- Derived 12DoF dynamics to describe the vibration caused by the joint between the flexible panels
- Examined the relationship between attitude control performance degradation and structural vibration caused by hinges connecting solar panels
- Analyzed the vibration characteristic depending on the number of panels
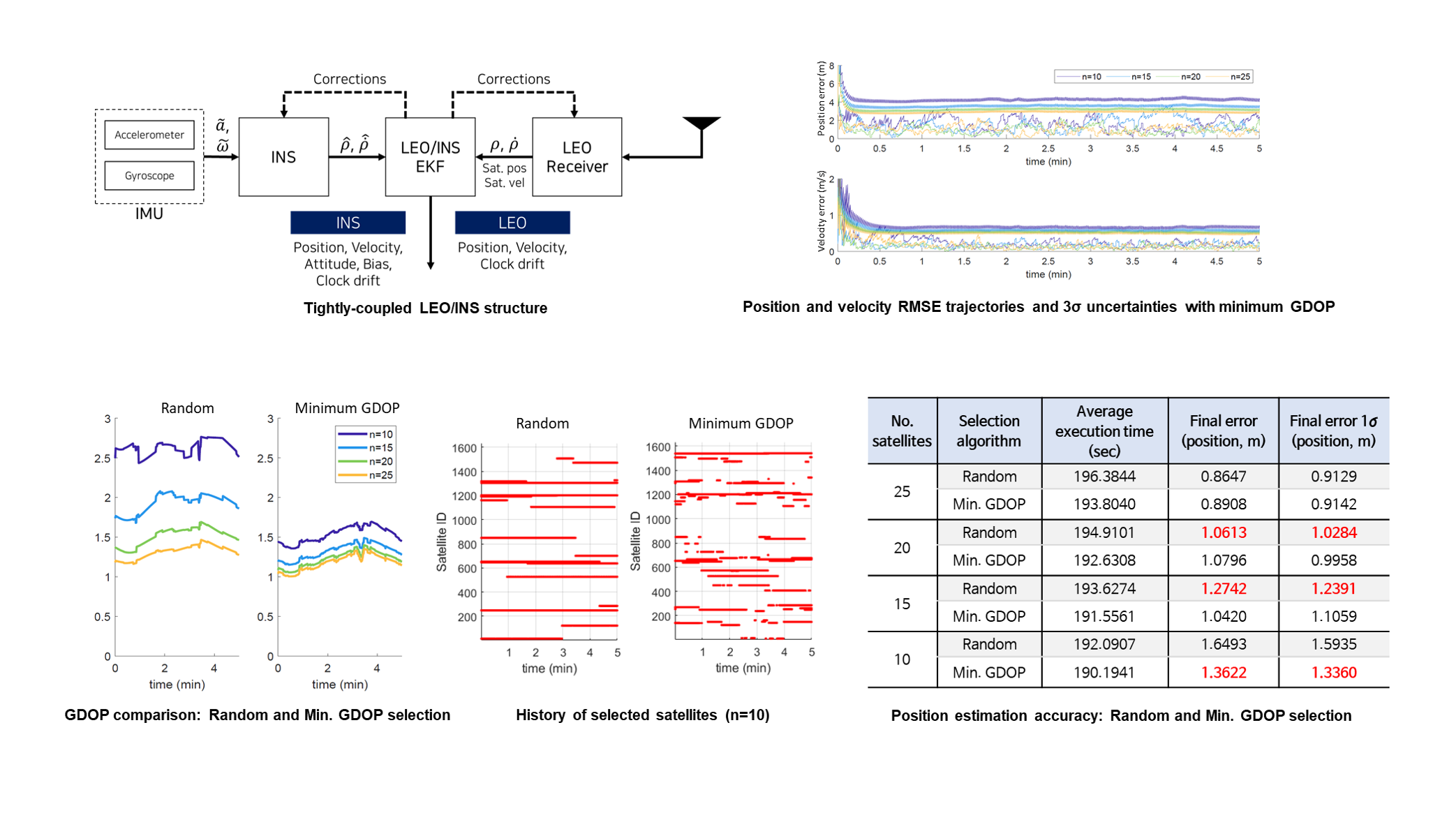
Navigation using LEO satellite mega constellation (2021)
The impact of the number of satellites on ground navigation using LEO satellite mega constellations was analyzed.
- Implemented a tightly-coupled LEO/INS EKF using Starlink constellation
- Applied a minimum GDOP selection algorithm
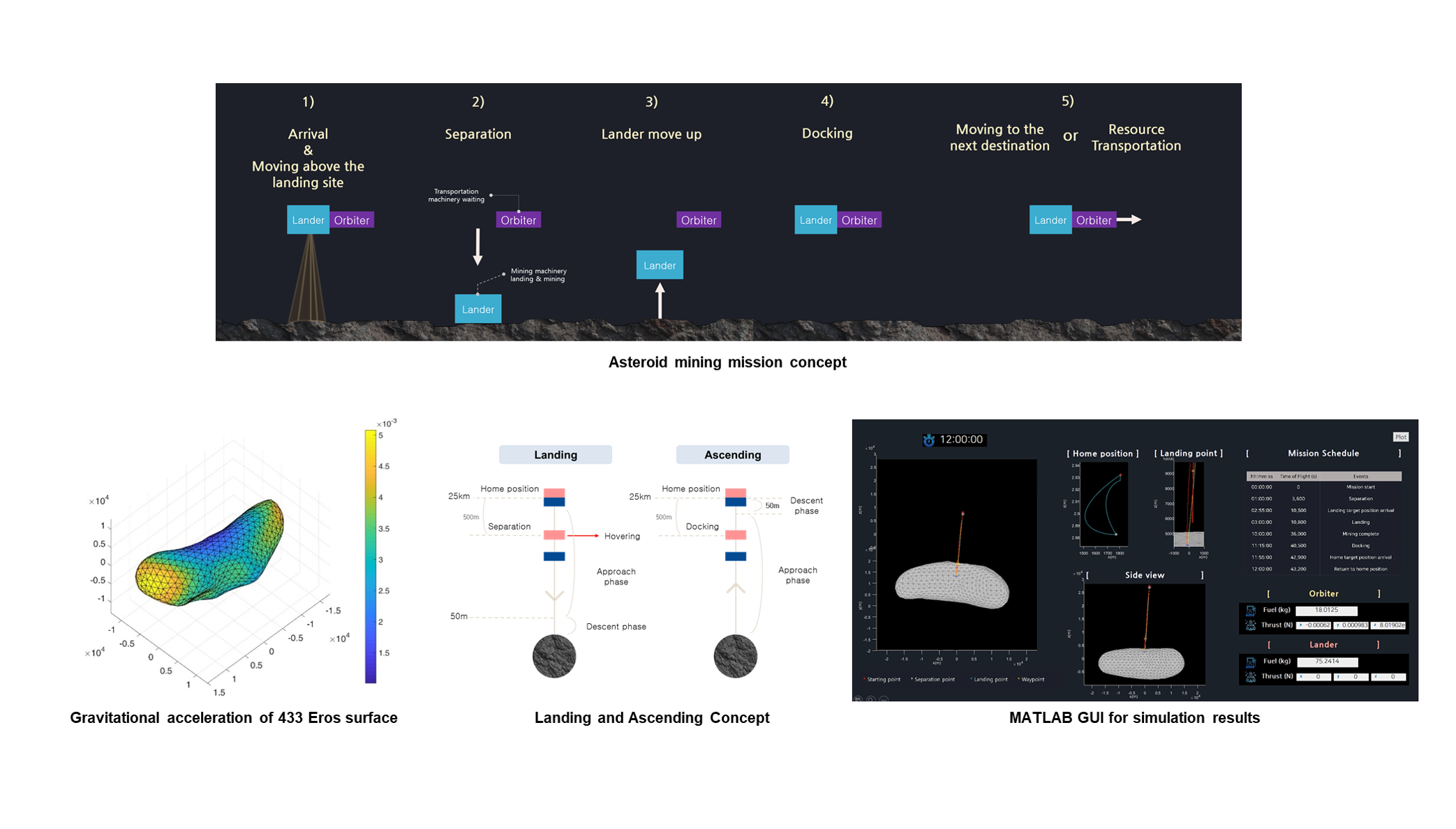
Soft landing and ascending guidance for an asteroid mining mission (2018)
An asteroid mining mission concept was suggested and a relevant guidance law was applied.
- Modeled gravity field of 433 Eros using the polyhedron shape model and suggested a mining process
- Applied a waypoint-based Apollo guidance law for the soft landing and ascending

RANDEV CubeSat development (2020-2022)
RANDEV is a 3U CubeSat made by KAIST's ASCL for the 5th CubeSat design contest (4 CubeSat in total) organized by KARI (Korea Aerospace Research Institute).
- Evaluated the performance of sensors and actuators (CubeADCS from CubeSpace)
- Designed commissioning sequence and programmed commissioning commands